To create a mission first we bound the area we want to mow with a polygon. We then use the polygon with YouNoMows “MowPlan” software to create the mission. Last we view the mission to ensure it is optimum and is what we intended
Currently there are 2 ways to create a mission polygon.
Use our GPSLogger device to create the polygon . This is very accurate
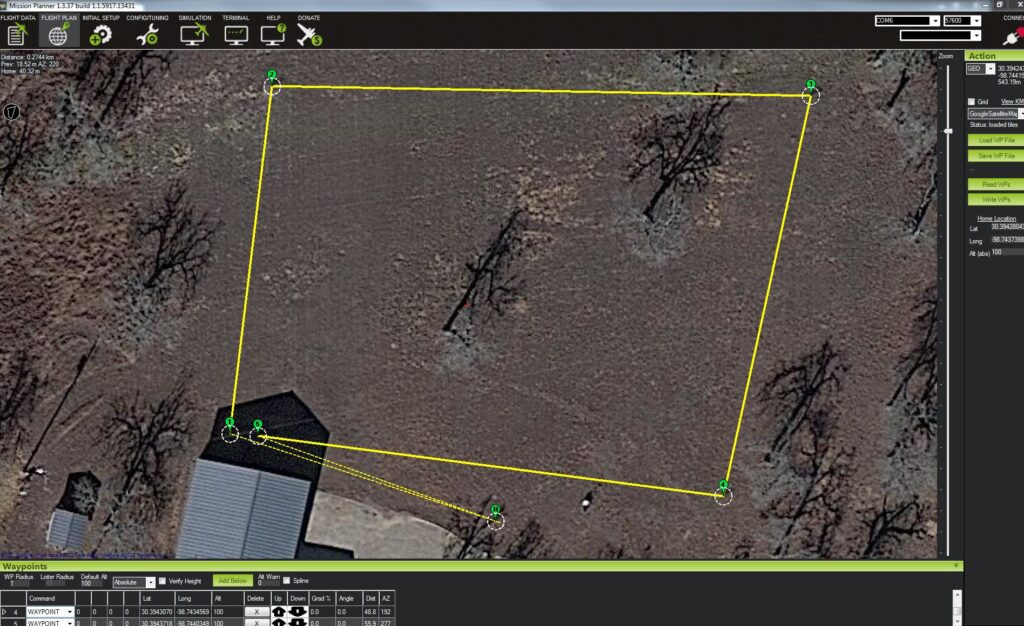
Or you can use Mission Planner to click on a satellite image of your mowing area to generate some points to constrain the area. This is less accurate
We intend to introduce a 3rd method and that involves driving the mower to collect the polygon data
Mission Planner is a open source program that can be downloaded free from the internet. Using this program we create a polygon
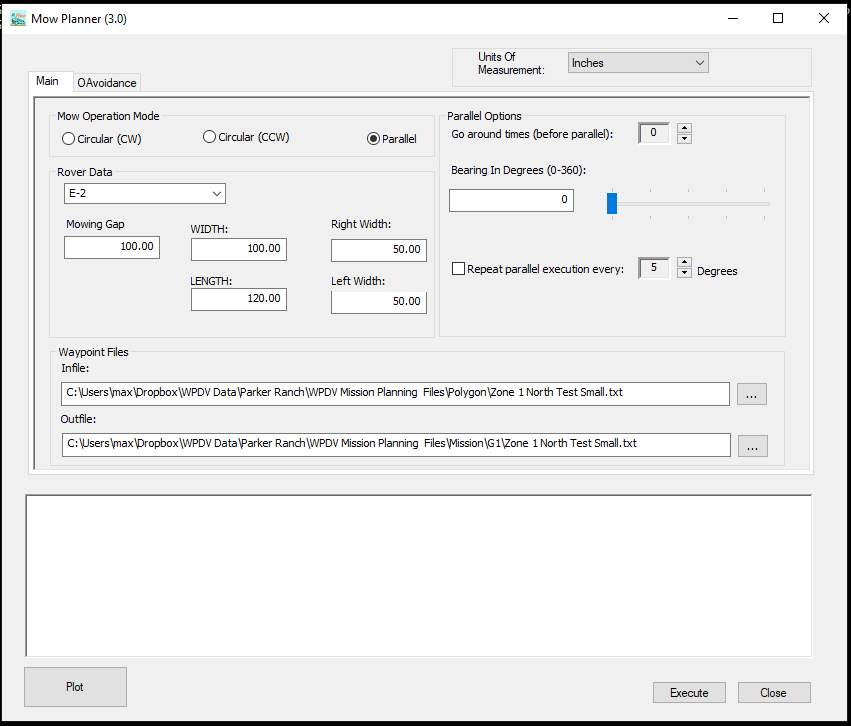
Then using YouNoMows software “MowPlan” we select parameters for the mission like the mower we are using, the mowing direction and spacing between the lanes. We can also run the software repeatedly at say 5 degree intervals and the software will tell us the bearings that require the most and leased way points to complete the mission. This directly translates into the longest and shortest mow time for the mission. We normally select the direction with the lease way points.
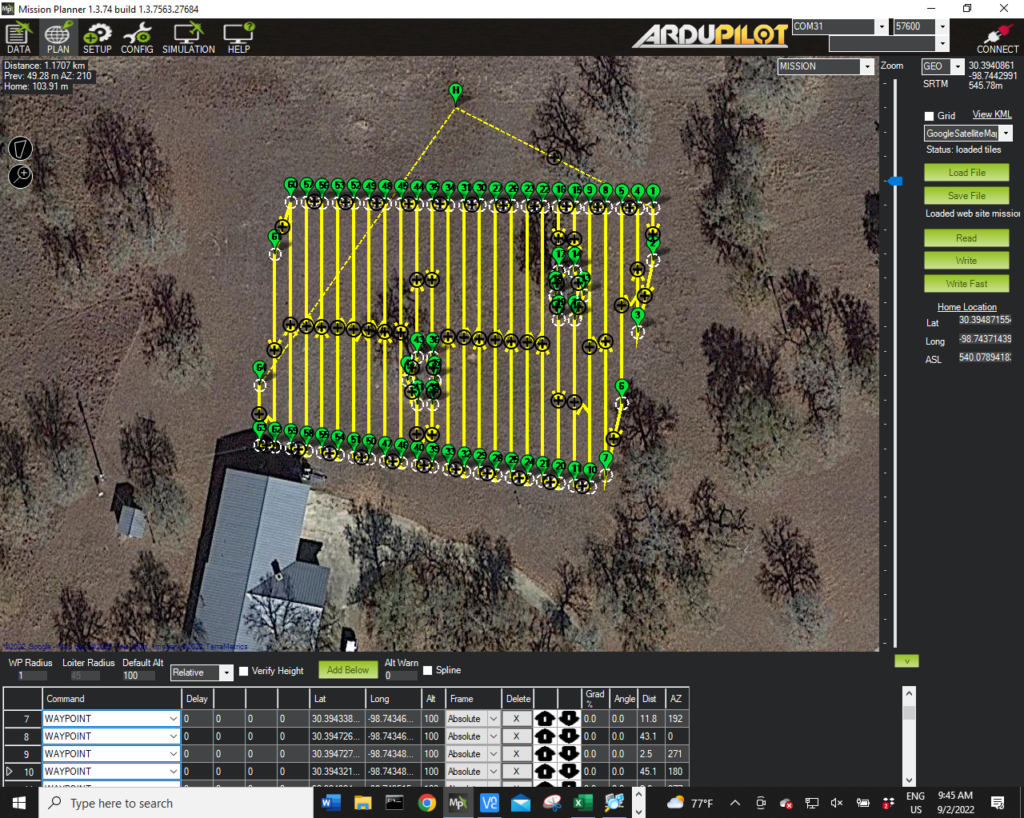
After modifying the parameters for the mission we create the mission file by pressing Execute. To view the mission file we load it into Mission Planner to ensure that the plan is optimum.
The mission file is then transferred to the Mower via Wi-Fi. The mower can store any number of mission files. Selection between the mission files is made on the main mower data screen
Then it is as simple as clicking a switch for the mower to starts its work